













자동차
제어 장치
사전 알고리즘 사전 연구 단계에서는 가장 직접적인 컨트롤러 솔루션으로 산업용 PC(IPC)를 사용하는 것이 좋습니다. 임베디드 장치에 비해 산업용 컴퓨터는 더 안정적이고 신뢰할 수 있으며 커뮤니티 지원 및 지원 소프트웨어도 더 풍부합니다. Baidu의 오픈 소스 Apollo는 GPU가 장착된 산업용 컴퓨터를 권장하며 모델은 아래와 같이 Nuvo-5095GC입니다.
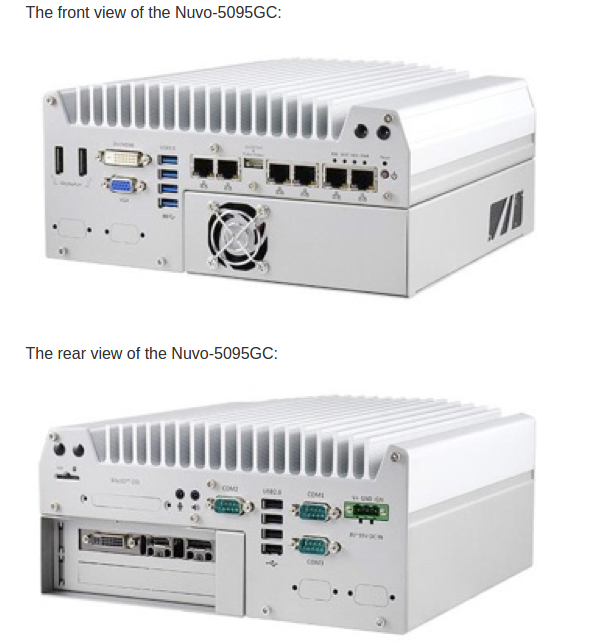
알고리즘 연구가 비교적 성숙되면 임베디드 시스템을 컨트롤러로 사용할 수 있는데, 예를 들어 Audi와 TTTech가 공동으로 개발한 zFAS는 최신 Audi A8 양산 차량에 적용되었습니다.
2. CAN 카드
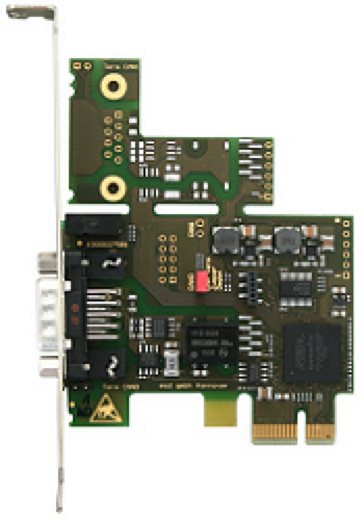
산업용 컴퓨터와 자동차 섀시 간의 상호 작용은 CAN이라는 특수 언어를 통해 이루어져야 합니다. 섀시에서 현재 차속, 스티어링 휠 각도 등의 정보를 얻기 위해서는 섀시에서 CAN 버스로 보낸 데이터를 파싱해야 하며, 산업용 컴퓨터가 센서 정보를 통해 스티어링 휠 각도와 예상 차속을 계산한 후 , 그것은 또한 식별될 수 있는 섀시로 메시지를 트랜스코딩하기 위해 CAN 카드를 사용해야 합니다. 신호, 섀시는 차례로 응답합니다. CAN 카드는 산업용 컴퓨터에 직접 설치한 다음 외부 인터페이스를 통해 CAN 버스에 연결할 수 있습니다. Apollo에서 사용하는 CAN 카드는 아래 그림과 같이 ESD CAN-PCIe/402입니다.
3. GPS(Global Positioning System) + IMU(관성 측정 장치)
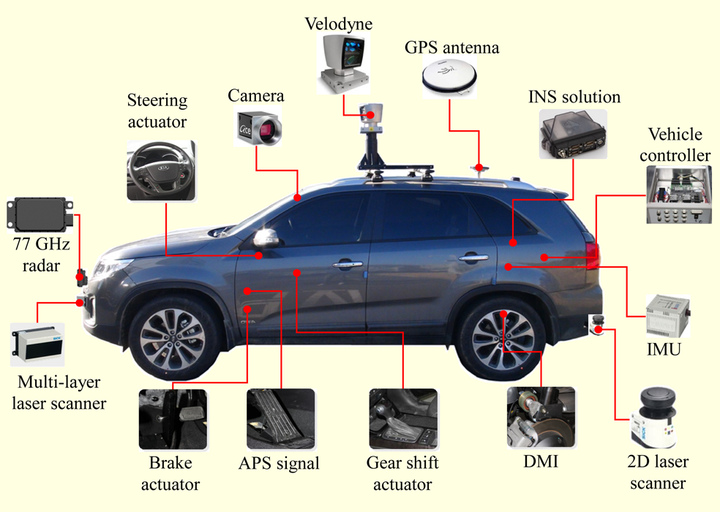
사람은 A 지점에서 B 지점으로 운전할 때 A 지점에서 B 지점까지의 지도와 현재 위치를 알아야 다음 교차로에서 우회전할지 직진할지 알 수 있습니다. 무인 시스템의 경우에도 GPS+IMU에 의존하여 현재 위치(경도 및 위도)와 주행 방향(방향)을 알 수 있습니다. 물론 IMU는 요레이트, 각도와 같은 더 풍부한 정보를 제공할 수도 있습니다. 가속도 등 이러한 정보는 자율주행차의 현지화 및 의사결정 제어에 기여합니다. Apollo의 GPS 모델은 NovAtel GPS-703-GGG-HV이며, IMU 모델은 NovAtel SPAN-IGM-A1입니다.

4. 지각 센서
비전 센서, 레이저 센서, 레이더 센서 등 많은 유형의 인식 센서가 있습니다.
시각센서는 카메라이며, 카메라는 단안시와 양안(입체)시로 구분된다. 잘 알려진 시각 센서 공급업체로는 이스라엘의 Mobileye, 캐나다의 PointGrey, 독일의 Pike가 있습니다. 레이저 센서는 최대 64라인까지 단일 라인, 다중 라인으로 나뉩니다. 각 라인이 추가될 때마다 비용이 10,000 RMB씩 증가하고 물론 해당 감지 효과도 더 좋습니다.
잘 알려진 레이저 센서 공급업체로는 미국의 Velodyne과 Quanergy, 독일의 Ibeo가 있습니다. 중국에는 Sagitar Juchuang과 Hesai Technology가 있습니다. 레이더 센서는 자동차에 널리 사용되기 때문에 Tier 1 자동차 제조업체의 강점입니다. 잘 알려진 공급 업체는 물론 Bosch, Delphi, Denso 등입니다.